Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD




_erpkup.jpg)

Traduction automatique
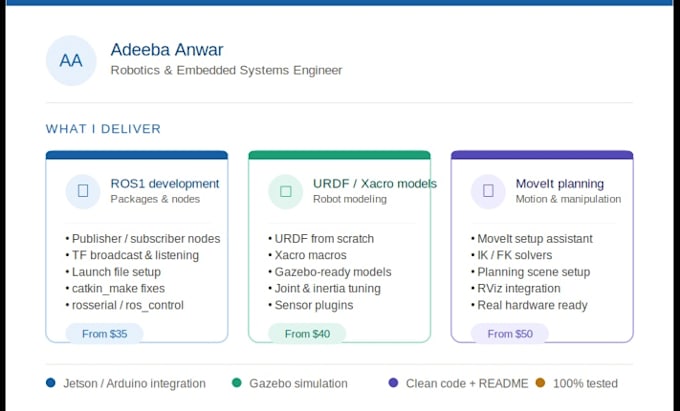
Je suis ingénieur en robotique et mécatronique, proposant des services professionnels en ROS1. J’aide les étudiants, chercheurs et startups avec la configuration de ROS, le débogage, la simulation de robots, la modélisation URDF/XACRO, la visualisation avec RViz et Gazebo, la planification de mouvement avec MoveIt, la cinématique inverse et le contrôle de trajectoire. Je travaille avec des manipulateurs robotiques, des robots mobiles et des systèmes autonomes, et je peux également aider à l’intégration matérielle basée sur ROS ainsi qu’à l’explication claire du code. Que vous ayez besoin d’une assistance rapide en ROS, de corriger des erreurs ou d’une simulation complète de robot, je fournis des solutions propres avec un accompagnement étape par étape et une livraison fiable.
ROS and Embedded Engr
Langues
Traduction automatique