Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Ingénieur en drone et expert KDP
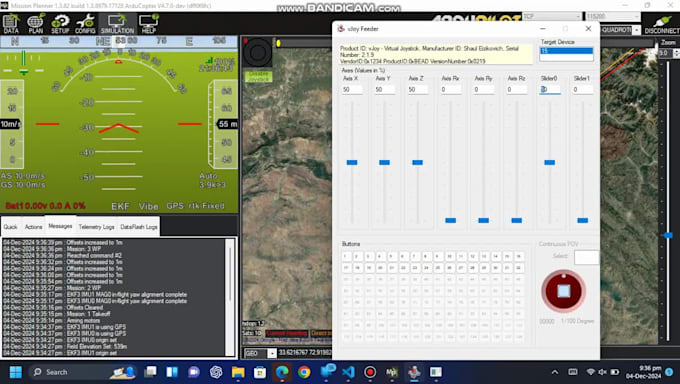
Vous cherchez un professionnel pour développer, personnaliser ou optimiser le firmware autopilot pour votre projet UAV ? Ne cherchez pas plus loin ! Avec plus de 3 ans d'expérience pratique dans le développement et l'intégration de firmware autopilot, je me spécialise dans la création de solutions avancées adaptées aux besoins spécifiques de votre UAV.
Ce que je propose :
Pourquoi me choisir ?
Que vous construisiez un nouveau système UAV ou que vous ayez besoin d’optimiser un système existant, je suis là pour vous aider ! Travaillons ensemble pour faire passer votre projet UAV au niveau supérieur.
Note : Contactez-moi avant de passer commande pour discuter de vos besoins spécifiques et garantir les meilleurs résultats.




Plateforme:
STM32
Traduction automatique
1. Avec quels types de systèmes autopilot travaillez-vous ?
Je me spécialise dans les systèmes autopilot open-source tels qu’ArduPilot et PX4. J’ai également une vaste expérience avec des plateformes matérielles comme Pixhawk et CUAV.
2. Pouvez-vous personnaliser le firmware pour des applications UAV spécifiques ?
Oui, je peux développer et personnaliser le firmware pour une large gamme d’applications UAV, y compris les missions autonomes, les manœuvres spécialisées et l’intégration de charge utile.
3. Fournissez-vous des services de test et de débogage ?
Absolument ! Je réalise des tests basés sur la simulation avec des outils comme Gazebo, Unreal Engine ou MATLAB pour valider la performance du firmware. Je propose également un débogage approfondi et une optimisation pour assurer fiabilité et efficacité.
4. Quelles sont les livrables que je peux attendre de ce service ?
Les livrables incluent généralement : Firmware personnalisé ou développé. Documentation détaillée pour le déploiement et la maintenance.
5. Pouvez-vous intégrer l’IA ou la vision par ordinateur dans le système autopilot ?
Oui, je peux intégrer des fonctionnalités d’IA telles que la détection d’objets et le suivi de mouvement dans votre système UAV, en utilisant des outils comme TensorFlow et OpenCV, à condition qu’elles correspondent à vos besoins. Cela entraînera un coût supplémentaire.
6. Avec quel type de véhicules travaillez-vous ?
UAV à voilure fixe et multirotors
7. Combien de temps faut-il pour développer ou personnaliser le firmware ?
Le délai dépend de la complexité de votre projet. La plupart des tâches sont terminées en 1 à 3 semaines, mais cela peut varier en fonction de l’étendue du travail. Je fournirai un calendrier détaillé après avoir discuté de vos besoins.
8. Pouvez-vous m’aider à déployer le firmware ?
Oui, je fournis une documentation complète et, si nécessaire, un guide étape par étape pour vous aider à déployer et tester le firmware avec succès.