Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Ingénieur aérospatial
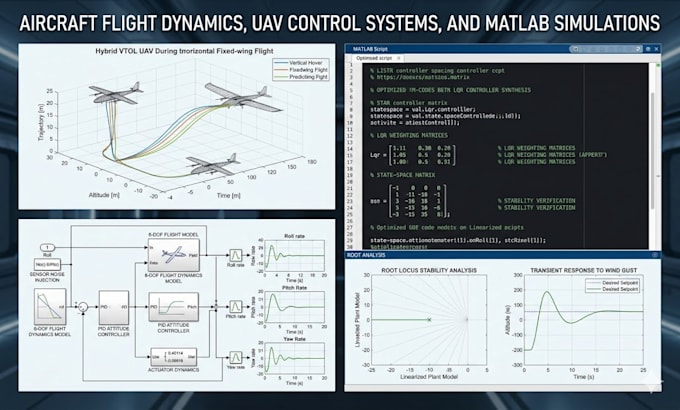
Expert en dynamique de vol des aéronefs, systèmes de contrôle UAV et simulations MATLAB. Je propose une analyse de stabilité professionnelle, la conception de contrôleurs PID/LQR, et la modélisation Simulink pour drones et véhicules aérospatiaux.
Je me spécialise dans le développement des bases mathématiques du vol, allant de la modélisation 6-DOF aux algorithmes de navigation autonome. Que vous construisiez un VTOL personnalisé ou un UAV à voilure fixe, je fournis les données de simulation rigoureuses nécessaires pour ajuster votre contrôleur de vol et prévoir avec précision le comportement en conditions réelles.
Services techniques inclus :
Livrables :
Comblez le fossé entre conception et vol. Contactez-moi pour discuter de vos besoins en contrôle dès aujourd’hui !

Traduction automatique
1. Fournissez-vous les fichiers source MATLAB (.m) et Simulink (.slx) ?
Oui, vous recevrez tous les fichiers source, y compris les initialisations de scripts et les diagrammes en blocs. Cela permet à votre équipe d’exécuter des simulations localement et d’intégrer la logique dans votre flux de travail existant.
2. Pouvez-vous concevoir des contrôleurs pour le vol de transition VTOL ?
Oui. Le vol de transition (passage du vol stationnaire vertical au vol horizontal avant) est l’un des défis de contrôle les plus complexes. Je peux développer des lois de contrôle combinées qui gèrent la transition entre rotors et surfaces aérodynamiques pour assurer une transition fluide et stable.
3. De quoi avez-vous besoin de ma part pour construire un modèle 6-DOF ?
J’ai besoin des données géométriques de votre aéronef (issues de CAD), des propriétés de masse (MTOW, moments d’inertie) et des coefficients aérodynamiques (généralement issus de mon service CFD ou de vos données en tunnel de vent). Si vous ne les avez pas, nous pouvons discuter d’un package combiné pour les calculer.
4. Pouvez-vous m’aider à régler mes gains PID pour un contrôleur de vol spécifique ?
Absolument. Bien que je travaille principalement avec MATLAB/Simulink, je peux traduire les gains simulés en paramètres compatibles avec des stacks de vol courants comme PX4, ArduPilot ou des contrôleurs C++ personnalisés, réduisant ainsi considérablement vos essais en vol par "essais et erreurs".
7. Est-il possible de réaliser des simulations "Monte Carlo" pour la validation de sécurité ?
Pour des projets à haute fiabilité (Premium), je peux effectuer des simulations Monte Carlo. Cela consiste à exécuter des milliers d’itérations de vol avec des variables aléatoires pour déterminer la probabilité de succès de la mission et identifier d’éventuelles défaillances en cas extrême.
