Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Développeur firmware senior
️ Transformez la télémétrie en mouvement réel Développement professionnel de contrôleurs multi-axes
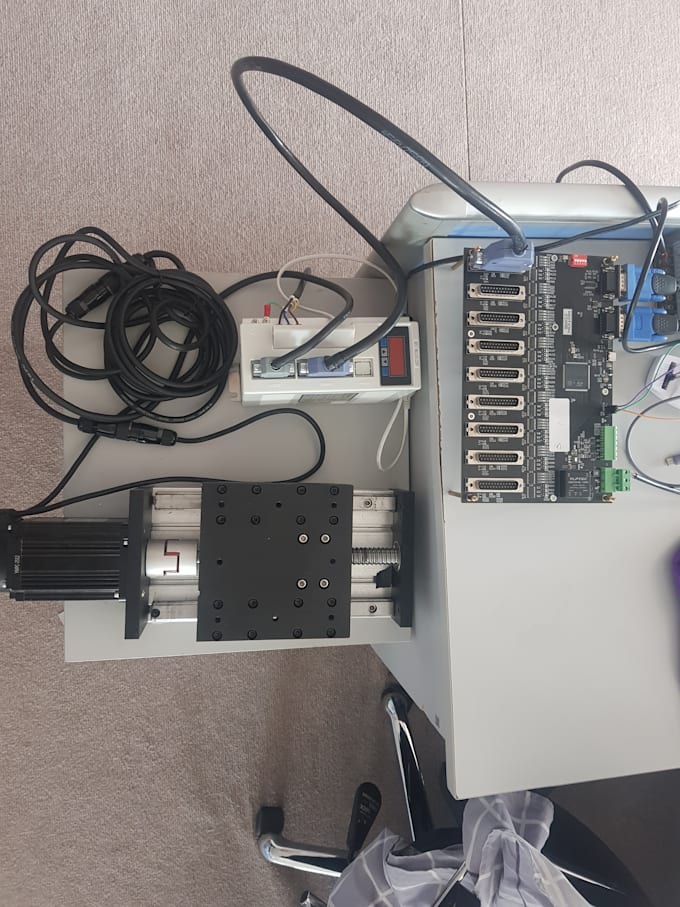
Vous souhaitez un rig de simulation de course qui donne vraiment la sensation du réel ? Je conçois et construis le cerveau embarqué qui convertit la télémétrie en jeu en mouvements physiques précis et synchronisés, utilisant la même ingénierie que celle des plateformes de mouvement professionnelles haut de gamme.
Je suis ingénieur en systèmes embarqués spécialisé dans le contrôle en temps réel de servos multi-axes sur STM32, allant d’un seul axe de preuve de concept jusqu’à une plateforme de mouvement complète à 9 degrés de liberté.
️ Ce que je construis
Firmware de contrôle de mouvement en temps réel
Boucle de contrôle déterministe à 500 Hz sur STM32 (Cortex-M4 / M7, par exemple STM32F407, STM32H743)
Sortie servo Pulse + Direction multi-axes synchronisée sans déphasage
Pipeline de télémétrie : filtrage des pics, lissage, limitation d’accélération/décélération, mise à l’échelle par axe
Intégration avec SimHub
Analyse du protocole série personnalisé avec synchronisation robuste des trames
Mapping plug-and-play pour suspension, survirage, perte d’adhérence et effets de tension de la courroie
Modes de contrôle mixtes dans un seul contrôleur : suivi de position, avance de vibration, contrôle de tension/force



Plateforme:
STM32
Capteurs:
Température
•
Emplacement (Location)
Expertise:
RTOS
•
IoT