Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD


Traduction automatique
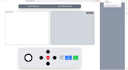
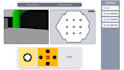
Je vais créer une interface utilisateur pour un tableau de bord de contrôle robotique React pour des projets de robots basés sur ROS2, des prototypes, des projets universitaires et des tableaux de bord de simulation.
Ce service se concentre sur la création d'une interface frontend propre, prête à l'intégration avec ROS2/rosbridge selon votre configuration.
Ce que je peux fournir :
- Interface utilisateur du tableau de bord de contrôle robotique
- Boutons de contrôle pour avancer, reculer, gauche, droite et arrêt
- Section de statut de connexion ROS
- Section ou espace réservé pour le flux de la caméra
- Section ou espace réservé pour la carte
- Panneau des cartes enregistrées
- Mise en page responsive du tableau de bord
- Code source React propre
- Améliorations simples de l'interface pour des tableaux de bord robotique existants
Note importante :
Ce service concerne principalement l'interface frontend du tableau de bord et une structure prête à l'intégration. L'intégration complète avec ROS2, le flux de la caméra, la carte ou le matériel du robot dépend de votre configuration existante et du choix des packages.
Veuillez me contacter avant de passer commande pour que je puisse bien comprendre votre projet.
Robotics Software Engineer
Langues
Traduction automatique
Traduction automatique
Pouvez-vous connecter ce tableau de bord avec ROS2 ?
Je peux rendre le tableau de bord prêt à l'intégration et aider avec la connexion ROS2 ou rosbridge selon votre configuration existante.
S'agit-il d'un système robot complet et fonctionnel ?
Non, ce service se concentre principalement sur l'interface du tableau de bord robotique React. L'intégration complète du matériel du robot, de la caméra ou de la carte dépend de votre configuration.
Pouvez-vous améliorer mon tableau de bord robotique existant ?
Oui, je peux améliorer l'UI, la mise en page, la réactivité, les contrôles et le design général du tableau de bord.
Vais-je obtenir le code source ?
Oui, le code source est inclus selon le pack choisi.


