Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD





Traduction automatique
Je propose des services de développement C++ professionnel pour des projets de robotique et d'automatisation, avec une expertise en implémentation d'algorithmes, développement de pilotes et tests de simulation. Que vous ayez besoin d’un petit nœud ROS2, d’une interface Qt ou d’un système SLAM complet avec simulation Gazebo, je peux vous aider à créer des solutions efficaces, modulaires et prêtes pour la production. Je suis là pour soutenir vos idées, simples ou complexes, avec un code propre et fiable.
Ce que je propose :
Pourquoi me choisir :
Avant de commander :
Veuillez me contacter d’abord pour discuter de la portée de votre projet, du calendrier et de vos attentes. Cela garantit que nous sommes parfaitement alignés avant de commencer.
Langues
Traduction automatique
Traduction automatique
Proposez-vous des révisions après la livraison ?
Oui. Je propose une révision gratuite dans le cadre du projet initial. Si la demande de révision inclut de nouvelles fonctionnalités ou dépasse les exigences convenues, des frais supplémentaires peuvent s’appliquer. Je vous confirmerai toujours avant d’effectuer toute mise à jour hors du cadre.
Que faire si mon projet est plus complexe ou prend plus de temps que le délai prévu ?
Pour des tâches complexes ou un support à long terme, je peux proposer un délai de livraison plus long. Dans ce cas, le prix peut également être ajusté en fonction de la portée et du temps requis. Veuillez me contacter d’abord pour que nous discutions du meilleur plan pour votre projet.
Pouvez-vous gérer des algorithmes personnalisés ou des systèmes robotiques avancés ?
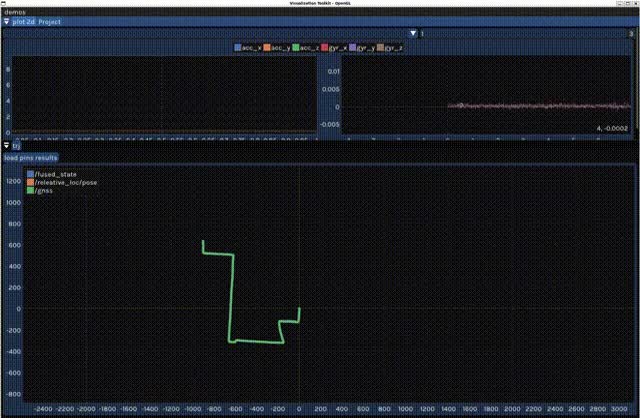
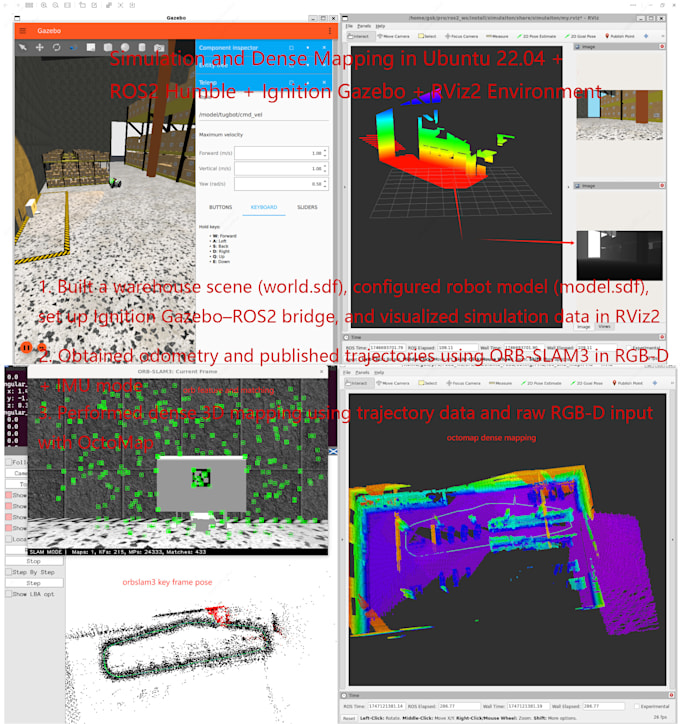
Absolument. Je me spécialise dans la mise en œuvre d’algorithmes en C++, l’intégration ROS2, le développement SLAM et les tests de simulation avec Gazebo. J’aime relever des projets techniquement difficiles et fournir un code modulaire et optimisé pour la recherche ou la production.
De quelles informations avez-vous besoin avant de démarrer le projet ?
Veuillez fournir une description claire de vos besoins, y compris vos objectifs techniques, outils préférés (par exemple Qt, ROS2, OpenGL), tout matériel de référence et résultats attendus. Plus vous partagez de détails dès le départ, plus le processus de développement sera fluide.
Pouvons-nous discuter du projet avant de passer une commande ?
Oui, je recommande vivement de me contacter avant de passer commande, surtout pour des tâches personnalisées ou complexes. Cela permet de s’assurer que nous sommes alignés sur les objectifs, le calendrier et le prix avant de commencer.
Fournissez-vous de la documentation ou des commentaires dans le code ?
Oui, pour la plupart des packages STANDARD et PREMIUM, j’inclus un code bien structuré avec des commentaires en ligne, et je peux également fournir une documentation technique de base sur demande.
🔒 Mon projet et mon code seront-ils confidentiels ?
Absolument. Je traite tous les projets avec une confidentialité stricte. Sauf si vous demandez un support continu ou des mises à jour futures, je supprimerai définitivement tout le code livré et les fichiers associés dans la semaine suivant la livraison réussie.