Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
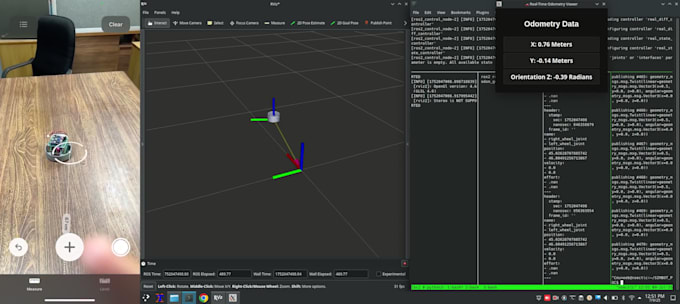
Solutions d'IA, DeepStream et robotique optimisées pour vos appareils en périphérie
Vous souhaitez intégrer l'IA en périphérie pour votre application robotique ? Je me spécialise dans la création de solutions d'Edge AI accélérées par matériel utilisant ROS2, parfaitement adaptées aux systèmes robotiques en temps réel et à faible latence.
En tant qu'expert en robotique et ROS2, je vous aiderai à déployer des applications robotiques intelligentes directement sur du matériel en périphérie comme Jetson Nano, Xavier, Raspberry Pi, Coral TPU, et plus encore, permettant l'inférence hors ligne, la fusion de capteurs et le contrôle en temps réel avec des modèles d'IA avancés.
Ce que je propose :
Technologies que j'utilise :
Idéal pour :


Plateforme:
NVIDIA Jetson
Capteurs:
Accéléromètre
•
Ultrasonique
•
Infrarouge
•
Camera
Traduction automatique
Q1 : Quels types de plateformes matérielles supportez-vous ?
A : Je supporte une large gamme d'appareils en périphérie, notamment NVIDIA Jetson Nano/Xavier, Raspberry Pi 4, Intel NUC, Coral Dev Board, et d'autres plateformes ARM/x86.
Q2 : Pouvez-vous déployer des modèles d'IA comme YOLO ou l'estimation de pose sur des appareils en périphérie ?
A : Oui ! Je peux optimiser et déployer des modèles tels que YOLOv5, YOLOv8, MoveNet, et des CNN personnalisés en utilisant TensorRT, ONNX ou TensorFlow Lite pour une inférence efficace en périphérie.
Q3 : Intégrerez-vous le modèle d'IA dans un nœud ROS2 ?
A : Absolument. Je créerai ou modifierai des nœuds ROS2 pour encapsuler votre modèle d'IA, publier les résultats d'inférence, et l'intégrer à votre pipeline de contrôle robotique.
Q4 : Fournissez-vous une interface matérielle comme le contrôle de moteurs ou la lecture de capteurs ?
A : Oui, je peux interfacer votre matériel (par exemple, moteurs, caméras, LIDAR, IMUs, etc.) avec ROS2 en utilisant des pilotes personnalisés ou standards.
Q5 : J'ai déjà un modèle d'IA entraîné — pouvez-vous le déployer sur mon matériel ?
A : Absolument ! Partagez simplement le fichier et le format du modèle, et je m'occuperai de la conversion, de l'optimisation et de l'intégration ROS2 pour le déploiement en périphérie.