Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Vaincre le mal par le bien est le bien, résister au mal par le mal est le mal
Niveau 1
Répond à certains critères de performance et présente un fort potentiel sur la place de marché.
ROS est largement utilisé dans l’industrie des robots . La création d'un package ROS est requise pour utiliser votre robot personnalisé.
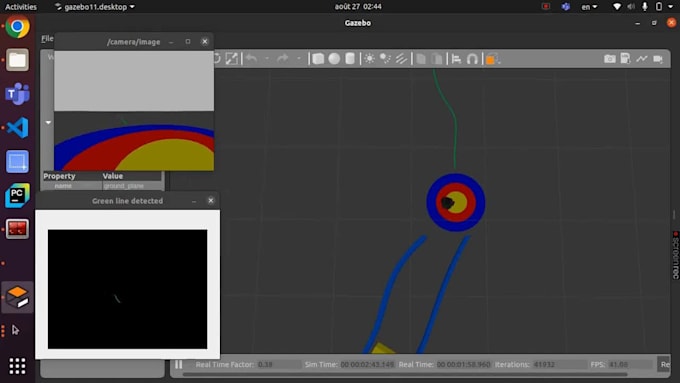
Ici, je vais créer un package ROS pour votre robot qui peut être un robot localisé ou manipulé. J'utiliserai le fichier URDF pour modéliser le robot à visualiser sur Gazebo .
Les spécifications du robot personnalisé sont requises par l' client.
Vous pouvez envisager d'avoir un package ROS professionnel contenant tous les contrôleurs et plugins de gazebo pour le scan laser, la caméra, les contrôleurs communs, ainsi qu'une carte pour SLAM .
Je ferai vos simulations ROS depuis les simulations Turtlesim de base jusqu'aux simulations de niveau avancé.