Déployez une navigation autonome fiable sur votre plateforme mobile. Je me spécialise dans la configuration, le réglage et le débogage de la ROS 2 Navigation Stack (Nav2) et des pipelines SLAM pour assurer une localisation robuste et une planification de trajectoire fluide.
Portée technique :
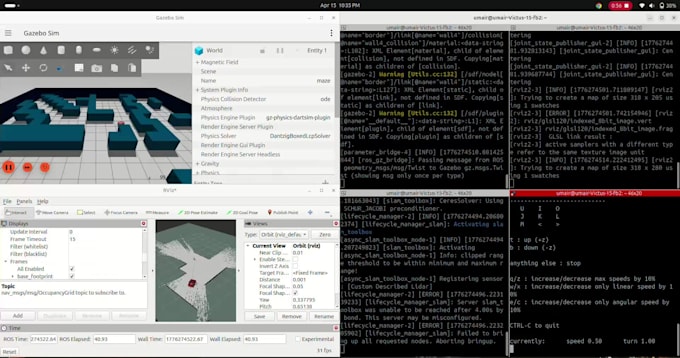
- Cartographie & SLAM : Configuration de SLAM Toolbox ou Cartographer pour la génération de grilles d'occupation 2D à haute résolution.
- Réglage de la localisation : Optimisation des paramètres d'AMCL (localisation Monte Carlo adaptative) pour éviter la dispersion des particules et le dérive.
- Configuration des costmaps : Réglage des costmaps globales et locales, des rayons d'inflation et des couches d'obstacles pour une évitement sécurisé des collisions.
- Planification de trajectoire & Contrôle : Ajustement de l'arbre de comportement avec des configurations personnalisées pour les planificateurs et contrôleurs (Dijkstra, DWA ou TEB Local Planner).
Compatible avec les configurations ROS 2 Humble et Jazzy. Veuillez fournir les détails de votre URDF ou de votre environnement Gazebo avant de commencer.