Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD




Traduction automatique
Avant de faire crash un drone personnalisé à 5000 $ ou de risquer d’endommager un prototype physique, vous avez besoin d’une simulation précise en physique.
Tester votre code dans un environnement virtuel est la méthode la plus sûre et la plus économique pour développer la robotique. Cela garantit zéro risque pour votre matériel et vous permet d’économiser des milliers d’euros en réparations et remplacements.
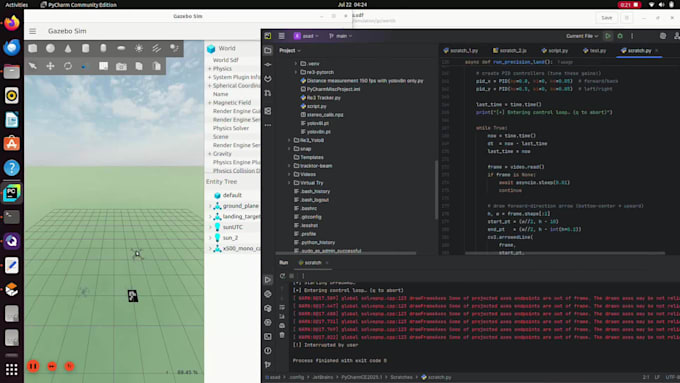
Je suis ingénieur en robotique et aérospatiale, spécialisé dans la création d’environnements de test personnalisés avec Gazebo et Unity. Que vous ayez besoin d’aide pour convertir un fichier CAD en un URDF fonctionnel, ou pour créer un environnement 3D complexe avec une physique avancée et une intégration complète de contrôle/navigation, je peux réaliser exactement ce dont votre projet a besoin.
Ce que je peux faire pour votre projet :
Outils : Gazebo, Unity3D, ROS/ROS2, Python, C++, SolidWorks.
AI Developer, Robotics Engineer, FPV Drone Design Expert
Langues
Traduction automatique
Traduction automatique
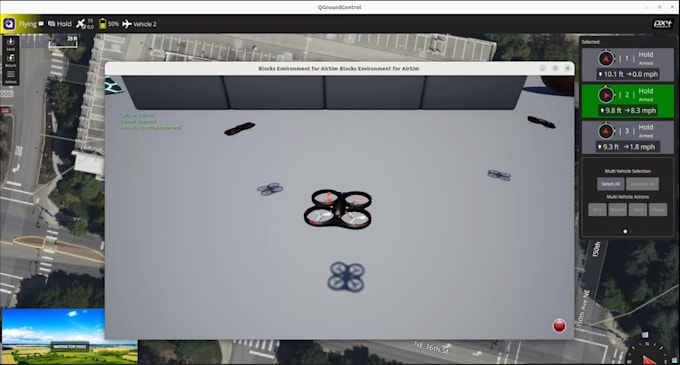
Quels types de projets conviennent le mieux à vos simulations ?
Elles sont parfaites pour tester des rovers autonomes (UGVs), des drones personnalisés (UAVs) et des bras robotiques. Si vous avez besoin de tester des stacks de navigation ROS/ROS2, des algorithmes de vision par ordinateur ou de vérifier des contraintes physiques avant de construire du matériel réel, ces simulations sont idéales.