Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
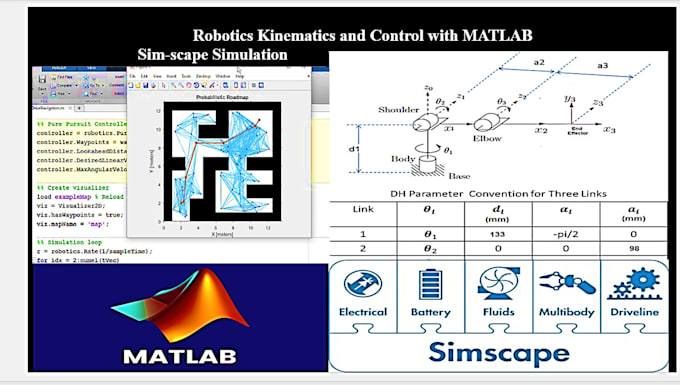
Je suis un expert complet dans les projets et la recherche en cinématique robotique. Je vous aiderai avec l’analyse cinématique et dynamique de bras robotisés à plusieurs degrés de liberté
La cinématique comprend
Évaluation du degré de liberté
La dynamique inclut
Logiciel :
Veuillez me contacter si vous avez des questions avant de passer commande