Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Spécialiste en EV et systèmes autonomes
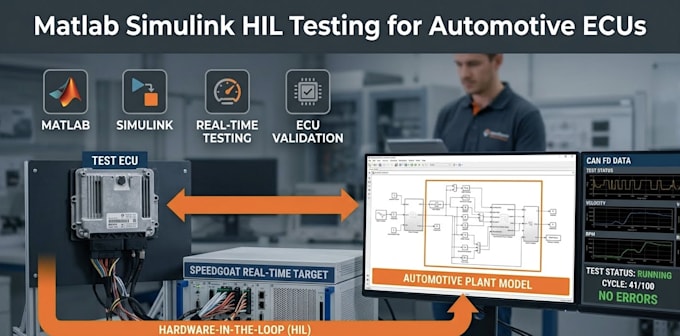
Vous avez du mal à passer de vos modèles Simulink à une simulation sur matériel HIL physique ?
Comblons le fossé entre votre code virtuel et les unités de contrôle électroniques (ECU) physiques. Je configure, optimise et déploie des environnements de test Hardware-in-the-Loop (HIL) robustes en utilisant MATLAB, Simulink Real-Time, et les interfaces matérielles Speedgoat ou dSPACE.
Si votre modèle génère des erreurs de solver, échoue lors de l'exécution en pas fixe, ou si la cartographie hardware-software I/O n’est pas correcte, je peux intervenir pour le corriger.
Ce que je gère pour votre configuration :
N'hésitez pas à me contacter pour en discuter davantage.
Merci !!!