Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Ingénieur mécatronique
Très réactif
Connu(e) pour ses réponses exceptionnellement rapides
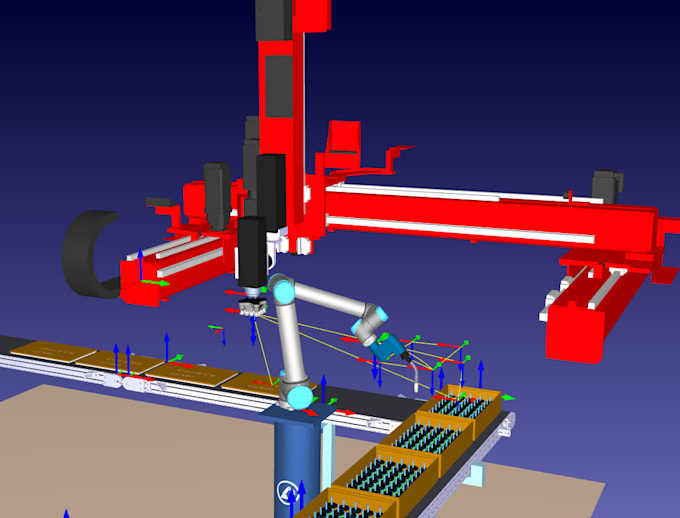
Expert en simulation RoboDK et programmation de robot
Vous cherchez un professionnel pour gérer votre projet de simulation RoboDK ou de programmation de robot industriel ? Vous êtes au bon endroit !
En tant qu'ingénieur en mécatronique avec une expérience pratique de RoboDK, je fournis des simulations de robot précises, entièrement testées, et des solutions d'automatisation pour des applications académiques, de recherche et industrielles.
Ce que je propose :
Secteurs que je couvre : Automobile | Fabrication | Alimentation & Boissons | Emballage | Projets académiques
Robots avec lesquels je travaille : KUKA | ABB | Fanuc | Universal Robots | Yaskawa | Staubli | Kawasaki
️ Outils & compétences : RoboDK | Python | MATLAB | Simulink | SolidWorks
Pourquoi me choisir : Formation en mécatronique Expérience en simulation propre, bien documentée Programmes testés et vérifiés avant livraison Consultation gratuite avant commande Révisions jusqu'à satisfaction


| (1) | ||
| (0) | ||
| (0) | ||
| (0) | ||
| (0) |

recruiter_nick

États-Unis
Money well spent.
50 $US-100 $US
Prix
2 jours
Durée

Réponse du freelance
| (1) | ||
| (0) | ||
| (0) | ||
| (0) | ||
| (0) |
recruiter_nick
États-Unis
Money well spent.
50 $US-100 $US
Prix
2 jours
Durée
Réponse du freelance