Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD

Level 2


Traduction automatique
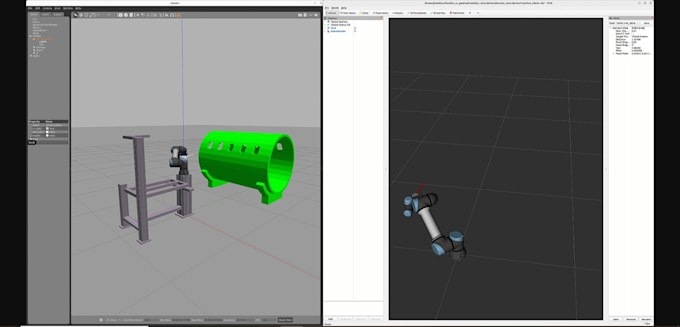
Vous souhaitez intégrer vos algorithmes de contrôle MATLAB directement dans ROS 2 ? Je vous aiderai à concevoir et à mettre en œuvre des plugins de contrôle ROS 2 personnalisés adaptés aux besoins de vos robots.
Que ce soit PID, contrôle adaptatif ou basé sur un modèle, je peux transformer votre logique MATLAB en un contrôleur ROS 2 fonctionnel compatible avec ros2_control et les simulations Gazebo/Ignition.
Les services incluent :
Je m'assure que les plugins soient propres, bien documentés et entièrement fonctionnels, prêts pour des robots réels ou simulés.
Donnez vie à vos stratégies de contrôle conçues avec MATLAB dans ROS 2 !
You Imagine what you desire and let happen!
Level 2
Langues
Traduction automatique