Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Ingénieur Conception Fabrication
Niveau 2
Répond à des critères de performance élevés et a fait ses preuves en matière de satisfaction clients.
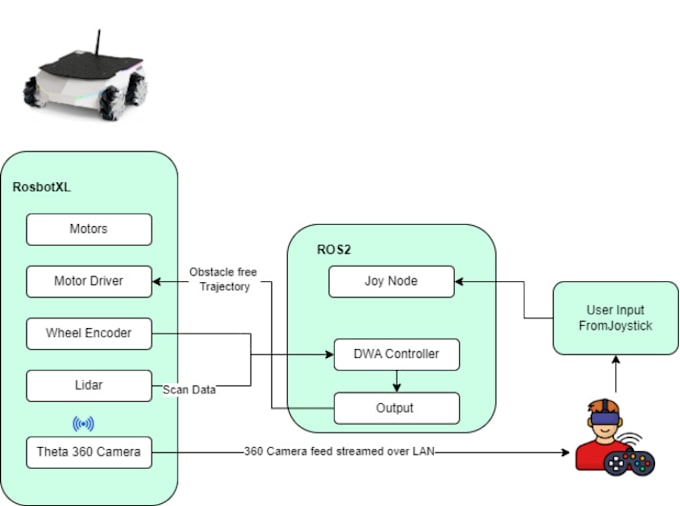
Vous développez un robot mobile ou un système autonome et avez besoin d’un support d’expert avec ROS 2 ? Vous êtes au bon endroit ! Je me spécialise dans le développement de projets de robotique avancée utilisant ROS 2, en mettant l’accent sur :
Ce que je propose :
Stack de navigation (Nav2)
Vous souhaitez que votre robot navigue de manière autonome à travers des cartes, évite des obstacles ou suive des points de passage ? Je vais configurer et ajuster l’ensemble du stack Nav2, y compris la cartographie, la localisation, la planification de trajectoire et les arbres de comportement.
Kinematics de robot
Je vais implémenter et valider la cinématique directe et inverse pour des bases mobiles différentielles, omnidirectionnelles ou personnalisées.
Contrôleurs Python personnalisés
De l’écriture de nœuds ROS 2 en Python à la création de contrôleurs sur mesure pour la planification de mouvement ou la fusion de capteurs, je peux adapter des solutions à vos besoins robotiques spécifiques.
Simulation (Gazebo, RViz)
Testez votre robot en simulation avant de passer à la réalité. Je supporte Gazebo/Ignition, RViz2, et plus encore.
Construisons votre robot ensemble !
Contactez-moi avant de passer commande pour que je comprenne vos besoins et vous propose la meilleure solution.
Cordialement,
Syed Huzaifa




Plateforme:
Raspberry pi
Expertise:
Microcontrôleurs
•
IoT
•
ROS
•
AI
•
Développement web