Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
Niveau 1
Répond à certains critères de performance et présente un fort potentiel sur la place de marché.
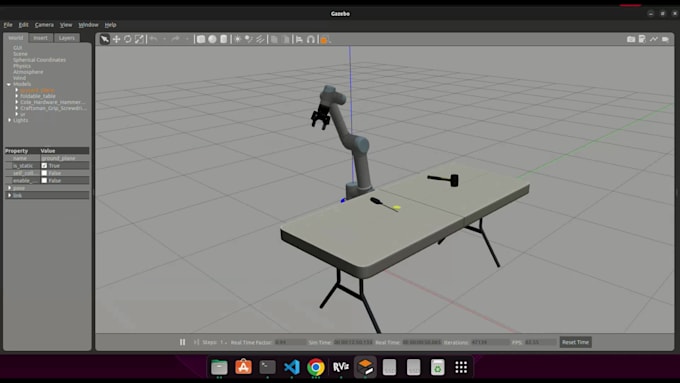
Je vais aider à simuler des bras robotisés avec planification de mouvement et contrôle dans ROS2 Gazebo. Je peux fournir des solutions personnalisées adaptées à vos besoins.
Pourquoi me choisir ?