Parcourir les catégories
Explorer
Fiverr Pro
Français
$
USD
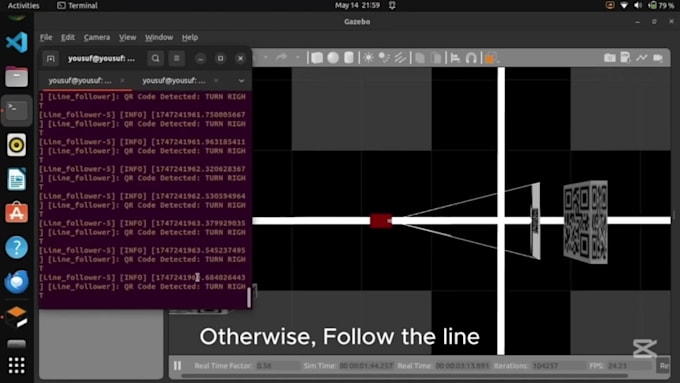
Donner vie aux robots et transformer les données en intelligence
Vous avez du mal avec la simulation ROS2 ou la modélisation de robot ?
Je suis étudiant en génie mécatronique avec une expérience pratique en ROS2, Gazebo, RViz, URDF et Xacro. Je vous aiderai à :
Créer un modèle de robot avec URDF/Xacro
Le simuler dans Gazebo
Le visualiser dans RViz
Ajouter des capteurs et des plugins
Configurer des fichiers de lancement et des packages
Que vous travailliez sur un projet universitaire, de la recherche ou une startup, je peux construire ou dépanner votre simulation ROS2. Faisons vivre votre robot




Traduction automatique
De quoi ai-je besoin pour commencer ?
Il suffit de décrire votre projet. Partagez tous croquis, exigences ou code partiel.
Pouvez-vous aussi aider avec des projets ROS1 ?
Je me concentre actuellement sur ROS2, mais n'hésitez pas à demander.
Quel système d'exploitation prenez-vous en charge ?
Ubuntu (22.04) – ROS2 Humble
| (1) | ||
| (0) | ||
| (0) | ||
| (0) | ||
| (0) |

alxberman

États-Unis
Excellent work. Great attention to detail.
50 $US-100 $US
Prix
2 jours
Durée
| (1) | ||
| (0) | ||
| (0) | ||
| (0) | ||
| (0) |
alxberman
États-Unis
Excellent work. Great attention to detail.
50 $US-100 $US
Prix
2 jours
Durée